Sobre o MPU6050 Pinout, Os sistemas de navegação avançados dependiam de sensores, mas tudo mudou quando os engenheiros os micro-mecanizaram para caberem em chips minúsculos.
Com um tamanho tão pequeno, baixo custo e baixo consumo de energia, o sensor entrou em quase todos os dispositivos eléctricos para realidade aumentada, jogos, monitorização de fitness, etc.
Mas e se combinarmos um sensor de giroscópio e um sensor de acelerómetro numa única placa de circuito? O resultado é o chip MPU6050, que fornece dados incrivelmente precisos sobre a orientação de um objeto. Aqui está um olhar de perto sobre o módulo e como pode ligá-lo a um Arduino MCU para o seu projeto.
Conteúdo
O que é a pinagem do MPU6050?
Configuração da pinagem do MPU6050
Pinagem do MPU6050 – Características do MPU6050
Pinagem do MPU6050–MPU6050 Módulo Sensor: Giroscópio + Acelerómetro
Alternativa para MPU6050
MPU6050 vs. MPU6000
Interface do MPU6050 com Arduino
Aplicações do MPU6050
Resumo
O que é a pinagem do MPU6050?
Um módulo MPU6050 é um Sistema Micro-Electro-Mecânico (MEMS) que mede velocidade, deslocamento, aceleração dinâmica/estática, orientação, momento angular e outros parâmetros relacionados ao movimento.
No seu cerne está um chip de rastreio de movimento de 6 eixos, económico e de baixo consumo, com três partes. A primeira é um acelerómetro de 3 eixos, a segunda é um giroscópio de 3 eixos e a terceira é um processador de movimento digital (DMP).
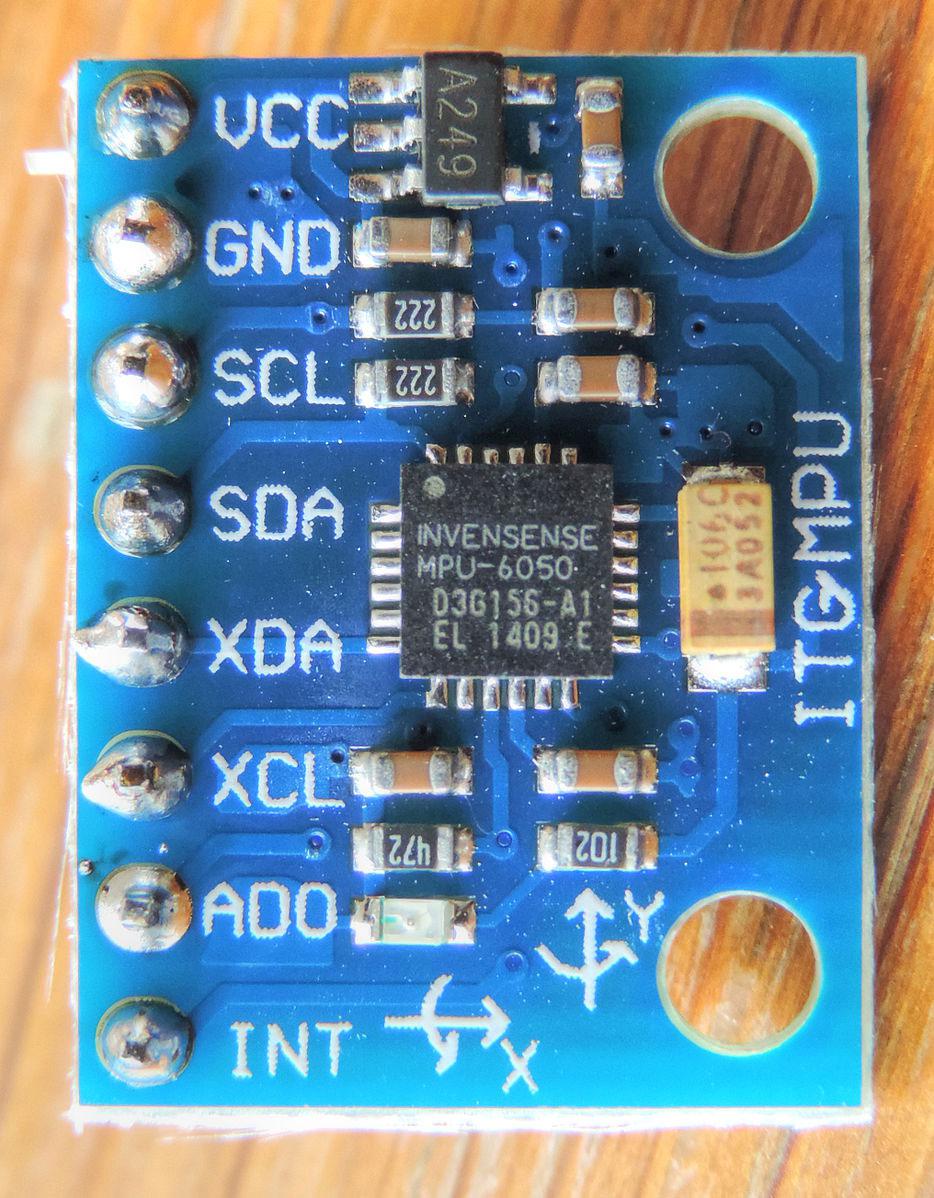
Um módulo MPU6050
Fonte: Wikimedia Commons
Os três dispositivos são montados em um pequeno pacote de 4 mm x 4 mm montado em uma placa de circuito com um regulador de 3,3 V.
Configuração de alinhamento de pinos MPU6050
O módulo MPU6050 tem os seguintes oito pinos principais.
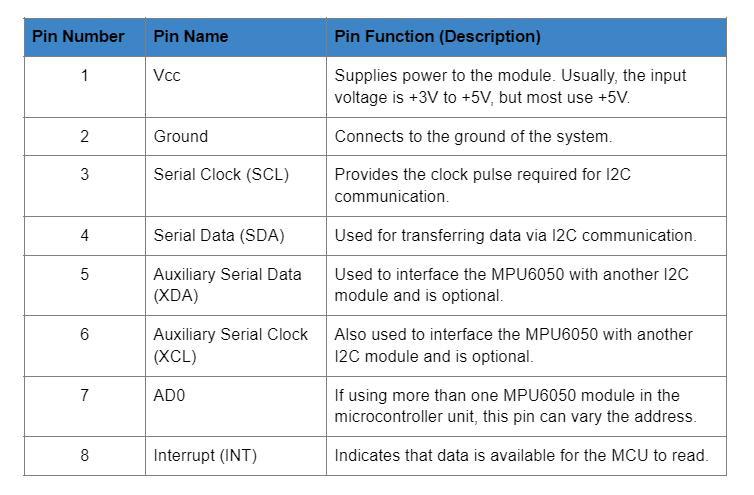
Arranjo de pinos MPU6050 – Características do MPU6050
Valor combinado do acelerômetro de três eixos MEMS e do giroscópio de três eixos
Potência: 3-5V
Protocolo de comunicação I2C
ADC incorporado de 16 bits para alta precisão
DMP embutido para alta capacidade de computação
Endereços I2C configuráveis
Sensor de temperatura incorporado
Interface com magnetômetros e outros dispositivos I2C
Arranjo de pinos MPU6050 – Módulo de sensor MPU6050: giroscópio + acelerômetro
Como mencionado anteriormente, o módulo MPU6050 é composto por três partes, mas o giroscópio e o acelerômetro são responsáveis pela medição. Eles trabalham assim.
Três eixos giroscópio
O giroscópio usa o efeito Coriolis para medir a rotação angular. Quando o giroscópio gira em torno do eixo X, Y ou Z, o efeito Coriolis cria uma vibração que o MEMS detecta.
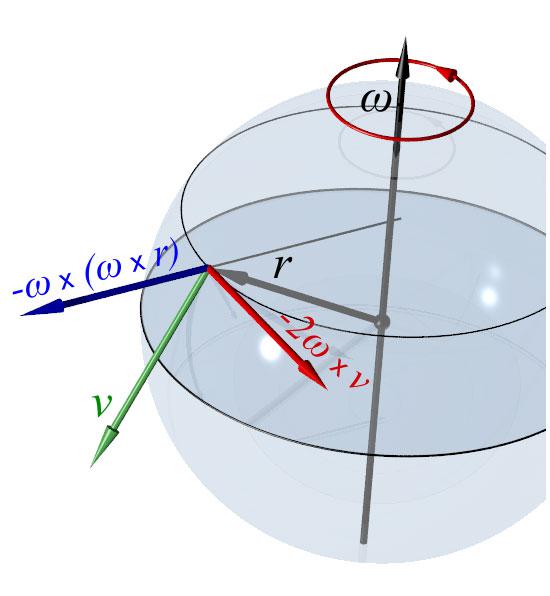
Força Coriolis.
Fonte: Wikimedia Commons Recursos
No entanto, o giroscópio MEMS é muito diferente do design convencional, pois contém uma massa de detecção de quatro partes. Esses componentes estão sempre em movimento de oscilação contínuo, entrando e saindo simultaneamente no plano horizontal. Ao fazer isso, eles respondem ao efeito Coriolis detectado pelo MEMS.
O módulo então amplifica, demodula e filtra o sinal detectado para gerar uma tensão proporcional à velocidade angular.
Um ADC de 16 bits digitaliza cada eixo e, em seguida, digitaliza o sinal de tensão, dando velocidades angulares em graus por segundo.
Acelerômetro de três eixos
Por outro lado, o acelerômetro mede a aceleração apropriada, ou seja, a taxa de mudança de velocidade de um objeto em seu quadro estático. O acelerômetro MEMS consiste em uma estrutura de microprocessamento com uma massa suspensa e uma placa fixa suspensa sobre uma mola de silício em um chip de silício.
Estrutura do acelerômetro
Fonte: Wikimedia Commons Recursos
Quando a aceleração ocorre em um eixo, a mola permite que a estrutura se mova livremente e se incline. Esse movimento cria um desequilíbrio no capacitor diferencial, o que resulta em uma mudança proporcional à aceleração do capacitor. O capacitivo forma a saída do sensor, e o ADC de 16 bits o digitaliza em unidades g (gravidade).
Devido à gravidade, o módulo mede continuamente 1 g no eixo Z no plano, mas os valores medidos nos eixos X e Y são 0 g.
Produtos alternativos para MPU6050
Você pode usar os seguintes produtos alternativos para o MPU6050:
ADXL335 (acelerômetro de três eixos)
ADXL345 (acelerômetro de três eixos)
MPU 9250 (unidade de medição inercial de 9 eixos)
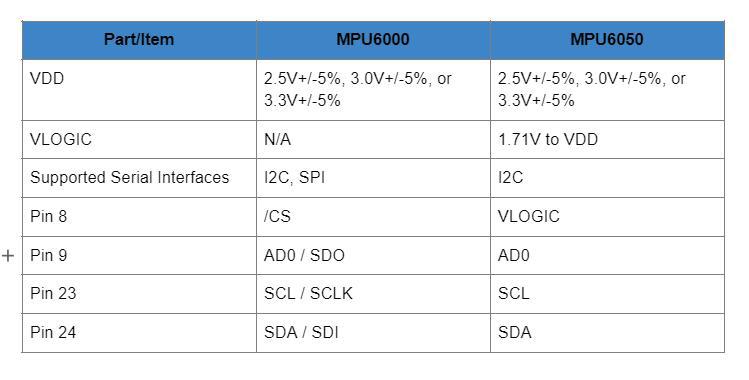
MPU6050 e MPU6000
Embora os dois sejam idênticos, existem algumas diferenças, como interfaces seriais suportadas e pinos de referência VLOGIC. A tabela a seguir resume todas essas diferenças.
Interface do MPU6050 com o Arduino
Como mencionado anteriormente, o módulo MPU6050 vem com um regulador de 3,3V montado na mesma placa que você pode usar com um microcontrolador lógico Arduino de 5V. Conectá-lo com o Arduino é muito simples, primeiro você deve conectar a saída Arduino de 5V ao pino Vcc, enquanto o pino de terra é conectado ao GND.
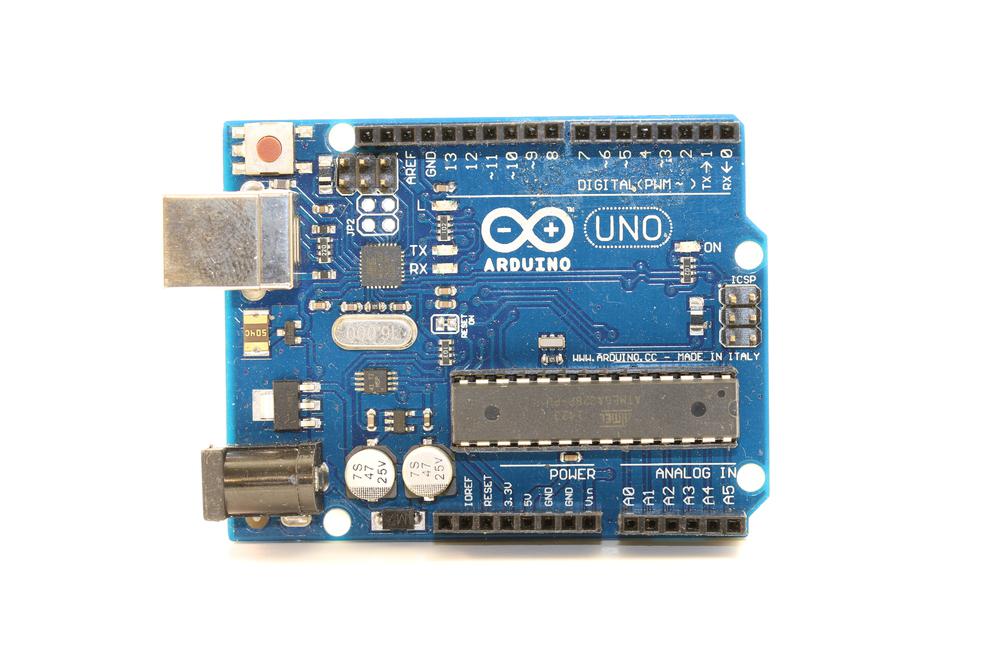
Um microcontrolador Arduino Uno. Cuidado com a conexão dos pés.
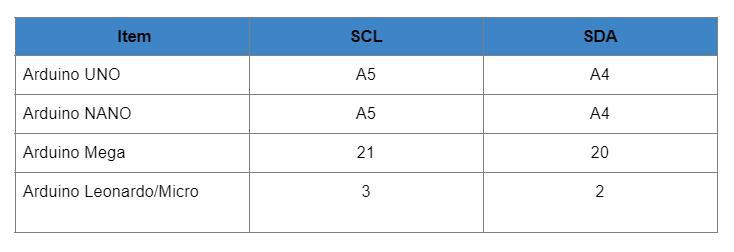
Depois de conectar as duas seções, o restante é uma conexão I2C, e a placa Arduino tem diferentes pinos I2C. No entanto, as placas com o layout R3 têm SCL (linha de relógio ou A5) e SDA (linha de dados ou A4) perto dos pinos AREF.
Ao usar diferentes placas Arduino, use a tabela abaixo para guiá-lo na conexão I2C.
Você pode conectar os dois diretamente ou através de uma placa de teste.
Biblioteca Instalação
Em seguida, você precisa usar uma biblioteca para criar uma interface I2C entre os dois através do Arduino IDE para que eles possam se comunicar. Embora seja fácil capturar dados brutos de um módulo, transformá-los em informações significativas pode ser complicado. A biblioteca simplifica esse processo, você pode usar o driver de sensor unificado da Adafruit, juntamente com a biblioteca de IO do Adafruit Bus.
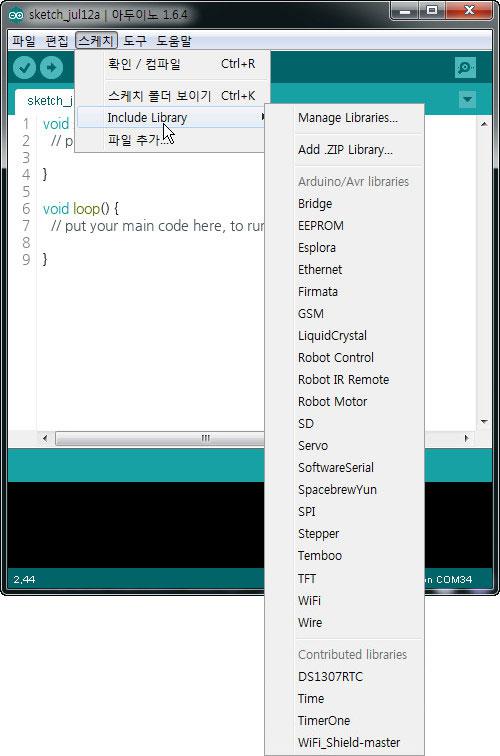
Como instalar uma biblioteca no Arduino IDE
Fonte: Wikimedia Commons Recursos
Alternativamente, você pode usar a biblioteca Arduino de Jeff Rowberg, que tem dois programas de exemplo. O primeiro método dá o valor original, enquanto o segundo método usa o DMP para otimizar o valor original.
Aceda a Esboços, Incluir bibliotecas, Gerenciar bibliotecas para instalar as bibliotecas e, em seguida, permita que o gerenciador de bibliotecas as baixe e atualize a lista de bibliotecas instaladas.
Em seguida, filtre sua pesquisa digitando “MPU6050” na janela do gerenciador de bibliotecas. Procure por uma biblioteca específica e instale-a.
Dados de leitura
Uma vez que tudo esteja funcionando corretamente, você deve definir a taxa de transmissão do monitor serial para 115200. O módulo envia uma grande quantidade de dados, portanto, uma taxa tão alta é necessária para exibir os dados na tela.
O código do Arduino fornecerá uma visão clara de como ler a aceleração angular, a aceleração linear e a temperatura do módulo. Quando você tiver dados sobre esses três parâmetros, tente mover o módulo para ver como as leituras mudam.
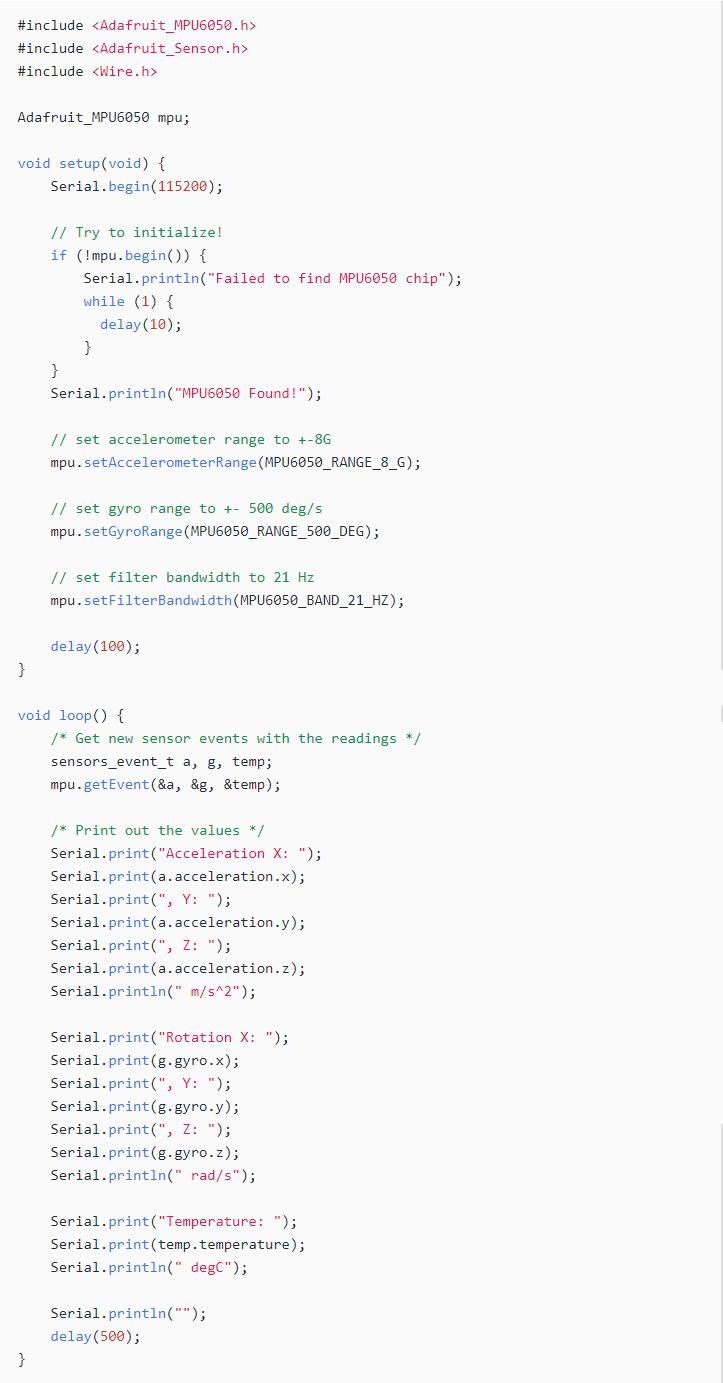
Código Arduino
Uma vez que você entenda o que está acontecendo, isso fornecerá uma base para experimentar em outros projetos mais práticos.
Além de ler os dados, você também deve pensar em desenhar os dados para que a saída do sensor do módulo seja melhor exibida à medida que você se move.
Os gráficos tornam as coisas mais fáceis de entender, e o Arduino tem ferramentas de plotadora serial que ajudam a visualizar os dados quando você faz a resolução de problemas no código. Mas para que a plotadora funcione corretamente, lembre-se de definir sua taxa de transmissão para 115200.
O Arduino captura leituras a cada 10 milissegundos e, em seguida, cria um diagrama de linha 2D contínuo.
Aplicações MPU6050
Você pode usar o módulo MPU6050 nas seguintes aplicações:
Medição IMU
UAVs/quatro eixos para controle de direção
Robôs auto-equilibrados e controle de braço robótico
Robô humanoide.

Robô humanoide (Sofia)
Sensores de inclinação
Telemóveis e dispositivos de jogos portáteis
Controladores de jogo baseados em ação

Wii Remote Plus e Wii Remote Game Controller
Fonte: Wikimedia Commons Recursos
Detector de rotação ou direção
Set-top box e controle remoto 3D para TV digital em rede
Ratos 3D
Resumo
Em resumo, o arranjo de pinos MPU6050 é um hardware importante amplamente utilizado em equipamentos eletrônicos modernos. No entanto, como um desenvolvedor, a melhor maneira de testar e usar o dispositivo é conectá-lo ao microcontrolador Arduino. Os passos acima devem ajudá-lo a configurar tudo e começar a trabalhar.
Se o seu projeto precisar do módulo ou tiver dúvidas sobre como conectá-lo ao Arduino, entre em contato conosco e responderemos às suas perguntas.
